Search
Robotics Automation and Control

Advanced Humanoid Robotic Interface & Control
<i>Technologies for Safe Workspace Control of Humanoid Robots:</i> Safety is critical in scenarios where humans (e.g., factory workers or astronauts) are working in proximity to, or interacting with, R2. Methods for applying workspace limitations in velocity-controlled robotic mechanisms (U.S. Patent No. 8,676,382) and force or impedance-controlled robots (U.S. Patent No. 8,483,877) help to ensure such safety.
<i>Autonomous Control Systems for Humanoid Robotics:</i> A multiple priority operation space impedance control system (U.S. Patent No. 8,170,718) provides arm control, including programmable Cartesian stiffness. An interactive robot control architecture (U.S. Patent Nos. 8,364,314, and 8,260,460, and 8,706,299), including a simple GUI, provides an interactive development and work environment that integrates sensor data and feedback generated by R2. An additional system selects and controls appropriate manipulators to perform grasping operations (U.S. Patent No. 8,483,882).
<i>Humanoid Robotic Health Management System:</i> A diagnostics, prognostics, and health management system for human robotics (U.S. Patent No. 8,369,992) operates at all hardware and software levels of the robotic system, enabling system-wide observability, controllability, maintainability, scalability, and extensibility.
<i>Electromagnetic Motor Braking:</i> Electromagnetic fail-safe brakes (U.S. Patent No. 8,067,909) allow for selective, reliable braking of robotic motors (e.g., brushless DC motors) to ensure safe and effective operation.
<i>Highly Durable Connector Pin:</i> To address the high failure rate of connectors in robotic systems with flexible members, a highly durable connector pin (U.S. Patent No. 8,033,876) was developed. The pin increases durability of connectors that are frequently flexed – a condition that causes deformation and compromises connectivity.
Aerospace
Aerospace Vehicle Entry Flightpath Control
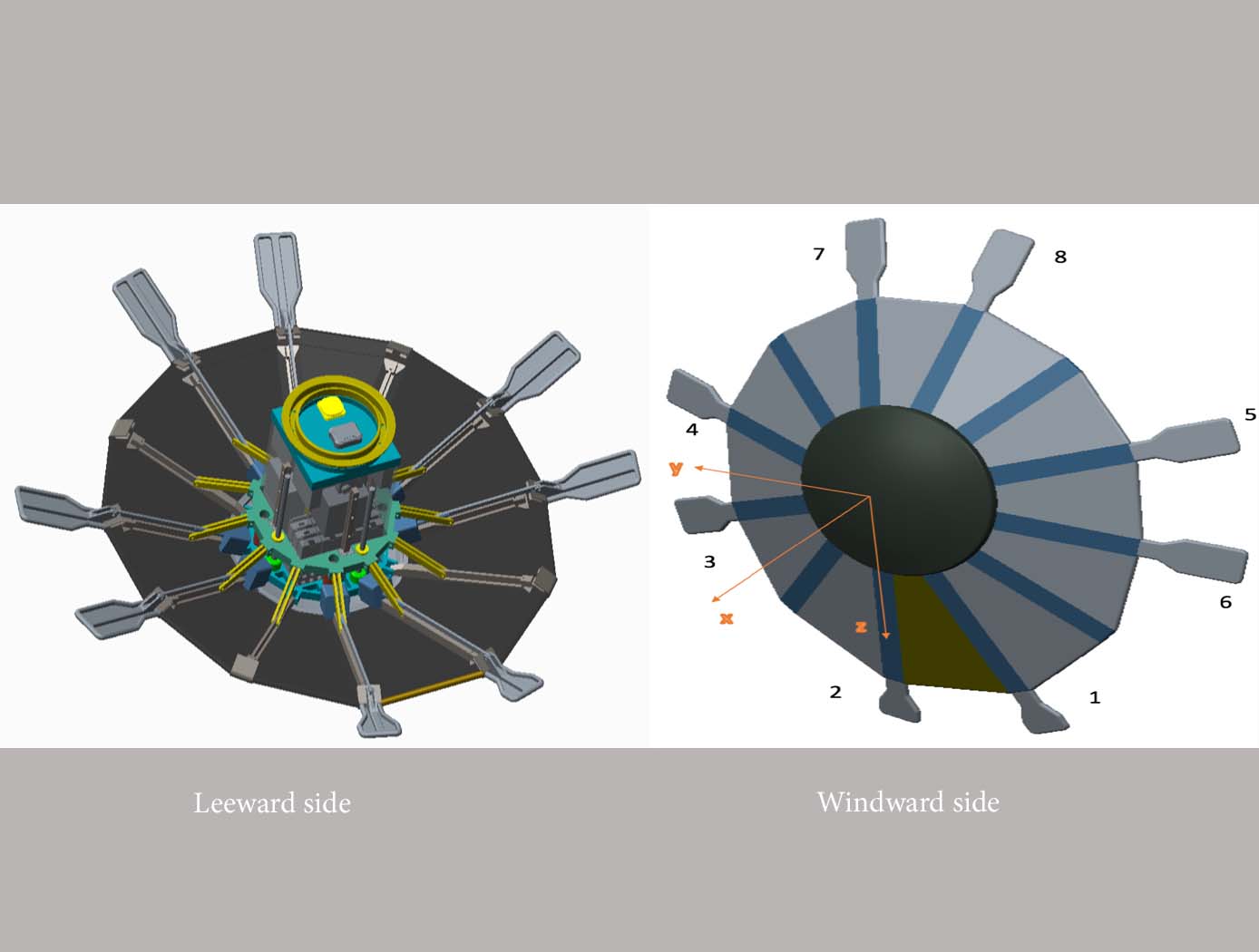
This novel flightpath control system exploits the dihedral effect to control the bank angle of the vehicle by modulating sideslip (Figure 1). Exploiting the dihedral effect, in combination with significant aerodynamic forces, enables faster bank accelerations than could be practically achieved through typical control strategies, enhancing vehicle maneuverability. This approach enables vehicle designs with fewer control actuators since roll-specific actuators are not required to regulate bank angle. The proposed control method has been studied with three actuator systems (figure below), Flaps Control System (FCS); Mass Movement Control System (MMCS); and Reaction Control System (RCS).
• FCS consists of a flap configuration with longitudinal flaps for independent pitch control, and lateral flaps generating yaw moments. The flaps are mounted to the shoulder of the vehicle’s deployable rib structure. Additionally, the flaps are commanded and controlled to rotate into or out of the flow. This creates changes in the vehicle’s aerodynamics to maneuver the vehicle without the use of thrusters.
• MMCS consists of moveable masses that are mounted to several ribs of the DEV heatshield, steering the vehicle by shifting the vehicle’s Center of Mass (CoM). Shifting the vehicle’s CoM adjusts the moment arms of the forces on the vehicle and changes the pitch and yaw moments to control the vehicle’s flightpath.
• RCS thrusters are mounted to four ribs of the open-back DEV heatshield structure to provide efficient bank angle control of the vehicle by changing the vehicle’s roll. Combining rib-mounted RCS thrusters with a Deployable Entry Vehicle (DEV) is expected to provide greater downmass capability than a rigid capsule sized for the same launch

